NO TEARS non-linear (gCastle)
Module name |
|
Package |
|
Version |
1.0.3 |
Language |
|
Docs |
|
Paper |
Zheng et al.[1] |
Graph type |
|
MCMC |
No |
Edge constraints |
No |
Data type |
C |
Data missingness |
|
Intervention type |
|
Docker |
NO TEARS non-linear
Notears Nonlinear. Include notears-mlp and notears-sob. A gradient-based algorithm using neural network or Sobolev space modeling for non-linear causal relationships.
Example
Config file: gcastle_nonlinear.json
Command:
snakemake --cores all --use-apptainer --configfile config/gcastle_nonlinear.json
Fig. 48 and Fig. 49 show the pattern graph’s FP/P vs. TP/P benchmark results for gCastle algorithms, and comparison with BOSS (TETRAD) and Iterative MCMC (BiDAG), tested on nonlinear data. The benchmark is based on 5 datasets corresponding to 5 realisations of a 20-variable random nonlinear Gaussian SEM with Erdős-Rényi structure (expected degree 4, max parents 5). The nonlinear relationships are modeled using multi-layer perceptrons (MLP) and quadratic functions, see gcastle_iidsim. Each dataset contains 300 standardized samples. The SEM parameters are uniformly sampled from [0.25, 1].
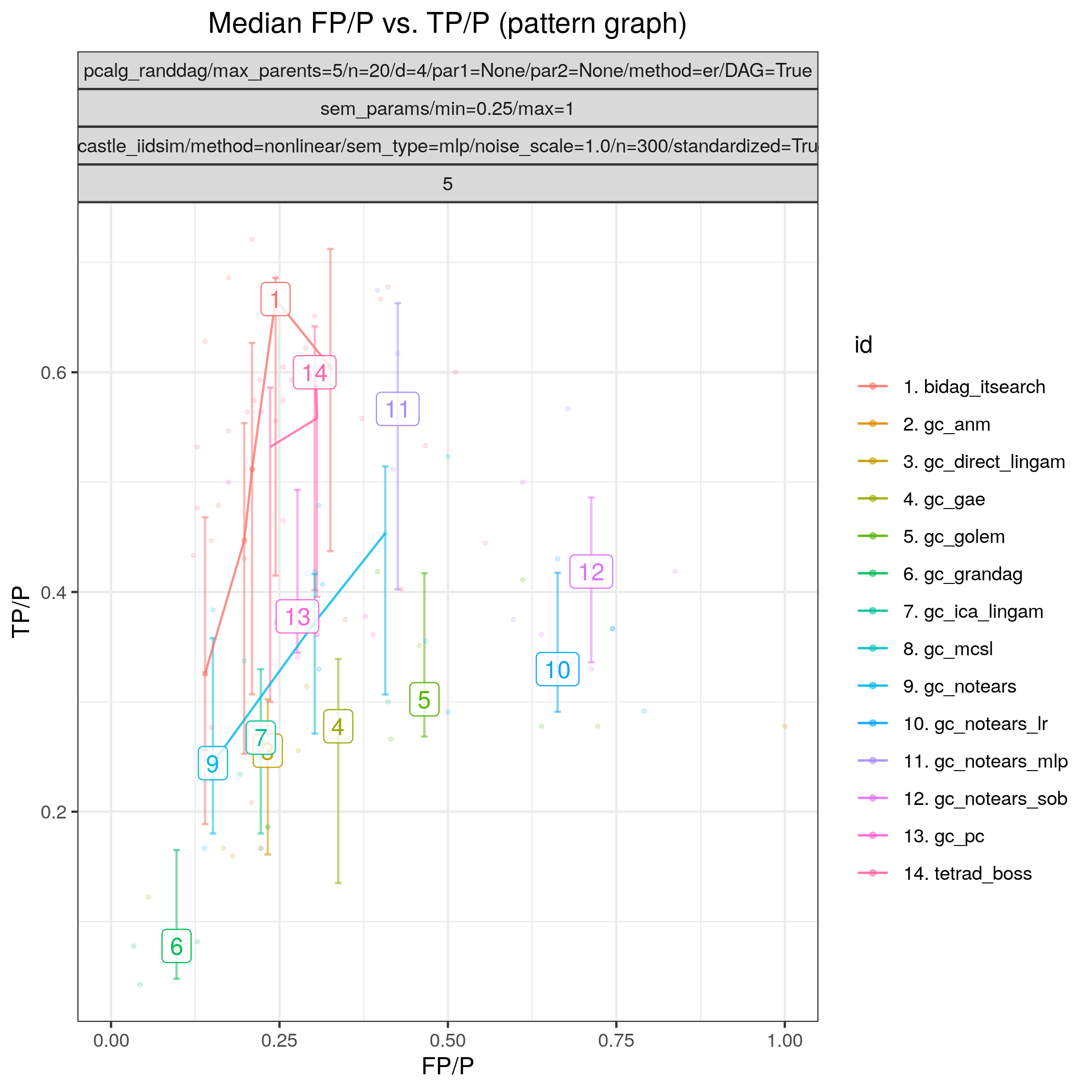
Fig. 48 FP/P vs. TP/P for gCastle algorithms on nonlinear MLP data.
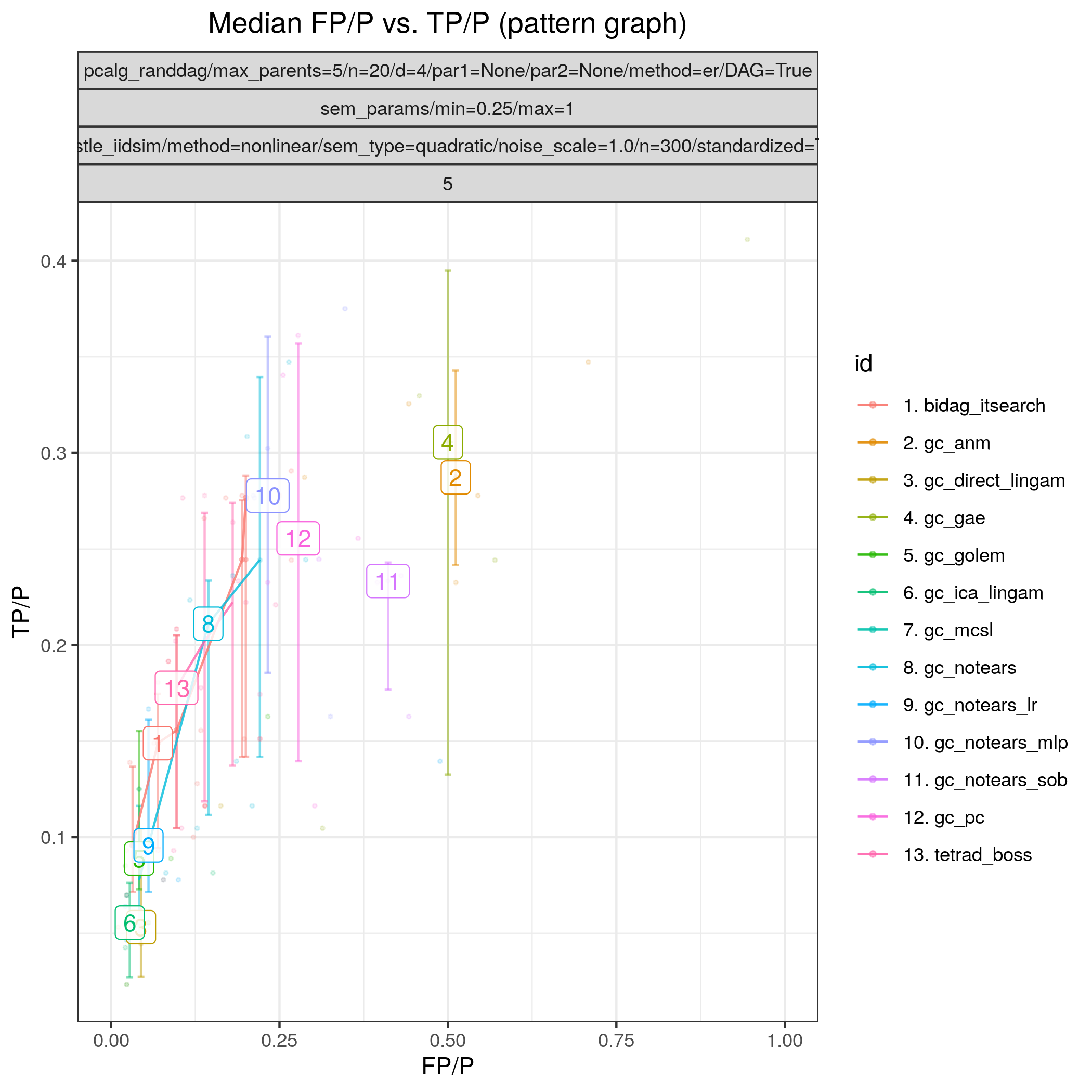
Fig. 49 FP/P vs. TP/P for gCastle algorithms on nonlinear quadratic data.
Example JSON
[
{
"id": "gcastle_notears_mlp",
"lambda1": 0.01,
"lambda2": 0.01,
"max_iter": 100,
"h_tol": "1e-8",
"rho_max": "1e+16",
"w_threshold": 0.3,
"bias": true,
"model_type": "mlp",
"device_type": "cpu",
"device_ids": null,
"timeout": null
},
{
"id": "gcastle_notears_sob",
"lambda1": 0.01,
"lambda2": 0.01,
"max_iter": 100,
"h_tol": "1e-8",
"rho_max": "1e+16",
"w_threshold": 0.3,
"bias": true,
"model_type": "sob",
"device_type": "cpu",
"device_ids": null,
"timeout": null
}
]